- Casa
- Sobre nosotros
- Productos
- Soluciones
- Centro Tecnológico
- Noticias
- Contáctenos
 |




| Cantidad: | |
|---|---|
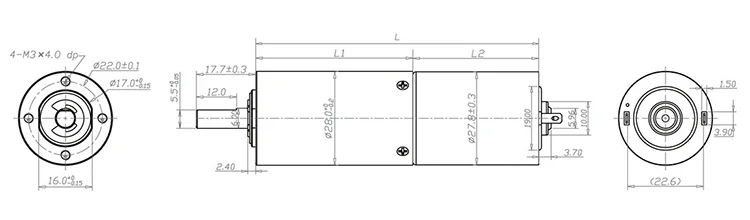
ZWBMD028028
Ritscher
El motor sin escobillas es un motor eléctrico de alta eficiencia y de bajo mantenimiento. Su principio de trabajo principal es reemplazar la conmutación mecánica de los motores electrónicos tradicionales sin escobillas con conmutación electrónica. Los motores sin escobillas generalmente están compuestos de múltiples bobinas (también llamadas devanadas del estator) y rotores de imán permanentes. Estas bobinas deben ser energizadas y desenergizadas en una secuencia de sincronización específica para generar un campo magnético giratorio para impulsar el rotor para que gire. En el circuito de accionamiento del motor sin escobillas, los transistores (como MOSFET o IGBT) u otros dispositivos de conmutación electrónica juegan un papel clave. Son responsables de controlar con precisión el estado de encendido y apagado de cada bobina. La señal de modulación de ancho de pulso (PWM) se usa para ajustar el tiempo de activación y apagado de estos dispositivos de conmutación, logrando así un control fino de la velocidad del motor, el torque y la eficiencia energética.
El estator de un motor electrónico sin escobillas generalmente consta de tres o más grupos de bobinas, que están dispuestas en una conexión de estrella (tipo Y) o triángulo (tipo δ). Cada grupo de bobinas se distribuye en un cierto ángulo en el espacio (por ejemplo, cada grupo de bobinas en un motor trifásico sin cepillo está separado por 120 grados) para garantizar que el campo magnético pueda girar de manera uniforme. El rotor está hecho de imanes permanentes (como imanes de neodimio), y su número de polos coincide con los cambios en el campo magnético de las bobinas del estator.
El funcionamiento de la electrónica sin escobillas depende de la conmutación electrónica, que es activar y desactivar las bobinas en un orden específico a través de circuitos externos. Por ejemplo, en un motor trifásico sin escobillas, el circuito de accionamiento energizará las bobinas trifásicas A, B y C en secuencia para generar un campo magnético giratorio. Este proceso requiere un control de sincronización preciso, que generalmente es implementado por un controlador de motor (como ESC, controlador de velocidad electrónico) o un microcontrolador (MCU). El controlador determina que el siguiente conjunto de bobinas se energizará en función de la posición del rotor (determinado por los sensores de la sala o la detección de EMF posterior).
En el circuito de accionamiento, los transistores (como el canal N o los MOSFET del canal P) son los componentes centrales. Cada bobina generalmente es controlada por uno o más transistores para formar un circuito de mitad de puente o puente completo (como una unidad trifásica de puente completo). Los estados de encendido y apagado de los transistores determinan directamente si las bobinas están energizadas. Por ejemplo, en una unidad trifásica de puente completo, los transistores de los brazos superiores e inferiores deben trabajar en parejas para evitar cortocircuitos y garantizar un flujo de corriente unidireccional.
La señal PWM controla el tiempo de conducción efectivo del transistor ajustando el ciclo de trabajo. Cuanto mayor sea el ciclo de trabajo, mayor será el voltaje y la corriente promedio de la bobina, lo que genera un campo magnético más fuerte, y el par y la velocidad de salida del motor también aumentan. La frecuencia de PWM suele ser alta (varios miles de hertz a decenas de kilohertz) para evitar el ruido audible y mejorar la precisión del control. Además, PWM también se puede utilizar para implementar funciones como inicio suave, frenado dinámico y recuperación de energía.
Las unidades de motor modernas sin escobillas generalmente usan algoritmos de control avanzados como la unidad sinusoidal (FOC, el control orientado al campo) o el disco de onda trapezoidal (conmutación trapezoidal). Estos algoritmos reducen el pulsación y el ruido del par y mejoran la eficiencia energética al optimizar las formas de onda PWM y el tiempo de conmutación. Por ejemplo, FOC realiza el control vectorial del campo magnético al descomponer la corriente en componentes de generación de campo magnético y componentes de generación de par, lo que hace que el motor funcione más suave y más eficiente.